
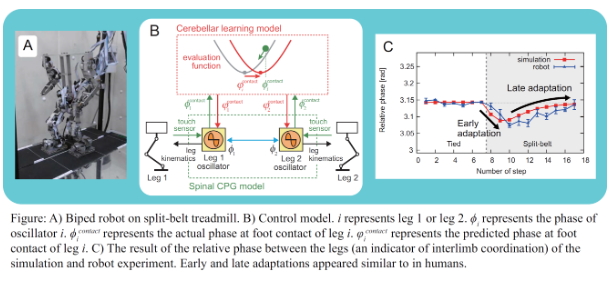
The ability to adapt our walking pattern to the environment is essential for everyday locomotion. This adaptive locomotion is achieved through highly coordinated movements within (intra) and between (inter) our limbs. However, it is not clear what mechanisms exist behind this coordination. Adaptation strategies during walking have previously been examined using split-belt treadmills. In these experiments, the treadmill has two independently controlled belts that force the legs to move at different speeds. In such split-belt treadmill walking, two types of adaptations have been observed: early and late adaptations. Early adaptations appear as rapid changes in inter-limb (e.g. relative phase between the legs) and intra-limb (e.g. stance duration per gait cycle) coordination. By contrast, late adaptations occur gradually after the early adaptations and only involve inter-limb coordination. Furthermore, inter-limb coordination shows after-effects when the belt speeds are equalized. It has been suggested that these adaptations are governed primarily by the spinal cord and cerebellum, but the underlying mechanism remains unclear. To understand the mechanism of these adaptations, we developed a control model based on the physiological findings, and investigated its adaptive behavior via split-belt treadmill walking experiments using both computer simulations and an experimental bipedal robot (Fig. A).
We assumed that the foot contact timing plays a crucial role for these adaptations because previous studies have showed that the vertical ground reaction forces and ankle stiffness remarkably change at foot contact due to changes in the belt speed condition. We developed a two-layered control model composed of spinal and cerebellar models (Fig. B). The spinal model generates rhythmic motor commands using an oscillator network based on a central pattern generator (CPG). It modulates the command timings formulated in immediate response to foot contact, while the cerebellar model modifies motor commands (only affecting the temporal pattern) through learning based on error information related to differences between the predicted and actual foot contact timings of each leg.
Our results showed that the robot exhibited rapid changes in inter-limb and intra-limb coordination that were similar to the early adaptations observed in humans. In addition, despite the lack of direct inter-limb coordination control, gradual changes and after-effects in the inter-limb coordination appeared in a manner that was similar to the late adaptations and after-effects observed in humans (Fig. C). Our results suggest that the modulation of the foot contact timing of each limb could induce the appropriate modulation of the whole body motion (i.e. achieving inter-limb coordination). The model studies are expected to be a useful tool to investigate hypotheses, such as ours, which are difficult to examine from the human measurement experiments.
Publication
Fujiki S, Aoi S, Funato T, Tomita N, Senda K, Tsuchiya K (2015). Adaptation mechanism of interlimb coordination in human split-belt treadmill walking through learning of foot contact timing: a robotics study. J. R. Soc. Interface. 2015 Jul 12:20150542. doi:10.1098/rsif.2015.0542.
About the Author

Soichiro Fujiki
Assistant professor at the University of Tokyo
Soichiro Fujiki is an assistant professor at the University of Tokyo. He obtained a PhD in Engineering at the Kyoto University, Japan. The goal of his research is to elucidate the mechanism behind motor control during locomotion. To investigate the control mechanism in humans and animals, he measures the motions of humans and animals and conducts numerical simulations and the robot experiments.
Copyright
© 2018 by the author. Except as otherwise noted, the ISPGR blog, including its text and figures, is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. To view a copy of this license, visit https://creativecommons.org/licenses/by-sa/4.0/legalcode.
ISPGR blog (ISSN 2561-4703)
Are you interested in writing a blog post for the ISPGR website? If so, please email the ISGPR Secretariat with the following information:
- First and Last Name
- Institution/Affiliation
- Paper you will be referencing